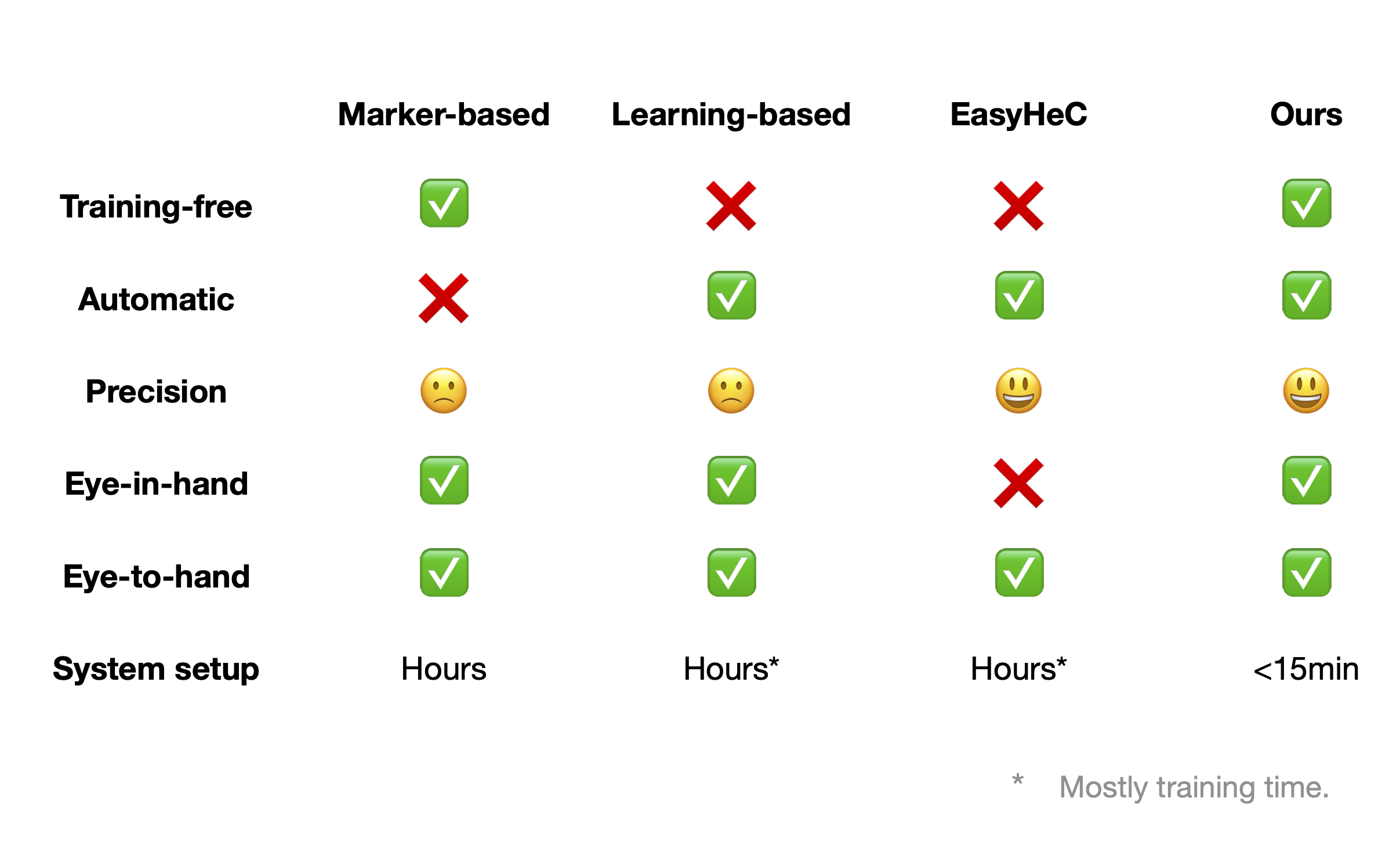
Comparison against previous methods
1Zhejiang University
2Tsinghua University
*Equal contribution
Hand-eye calibration plays a fundamental role in robotics by directly influencing the efficiency of critical operations such as manipulation and grasping. In this work, we present a novel framework, EasyHeC++, designed for fully automatic hand-eye calibration. In contrast to previous methods that necessitate manual calibration, specialized markers, or the training of arm-specific neural networks, our approach is the first system that enables accurate calibration of any robot arm in a marker-free, training-free, and fully automatic manner. Our approach employs a two-step process. First, we initialize the camera pose using a sampling or feature-matching-based method with the aid of pretrained image models. Subsequently, we perform pose optimization through differentiable rendering. Extensive experiments demonstrate the system’s superior accuracy in both synthetic and real-world datasets across various robot arms and camera settings. The code will be publicly available upon the publication of this paper.
@inproceedings{hong2024easyhec++,
title={Fully Automatic Hand-Eye Calibration with Pretrained Image Models},
author={Hong, Zhengdong and Zheng, Kangfu and Chen, Linghao},
journal={International Conference on Intelligent Robots and Systems (IROS)},
year={2024}
}